
{kind=link}
I upgraded two Prusa MK3s to MK3.9, and ended up with a couple of spare boards, stepper motors and a bunch of other things. So I decided to turn them into a Makelangelo clone!
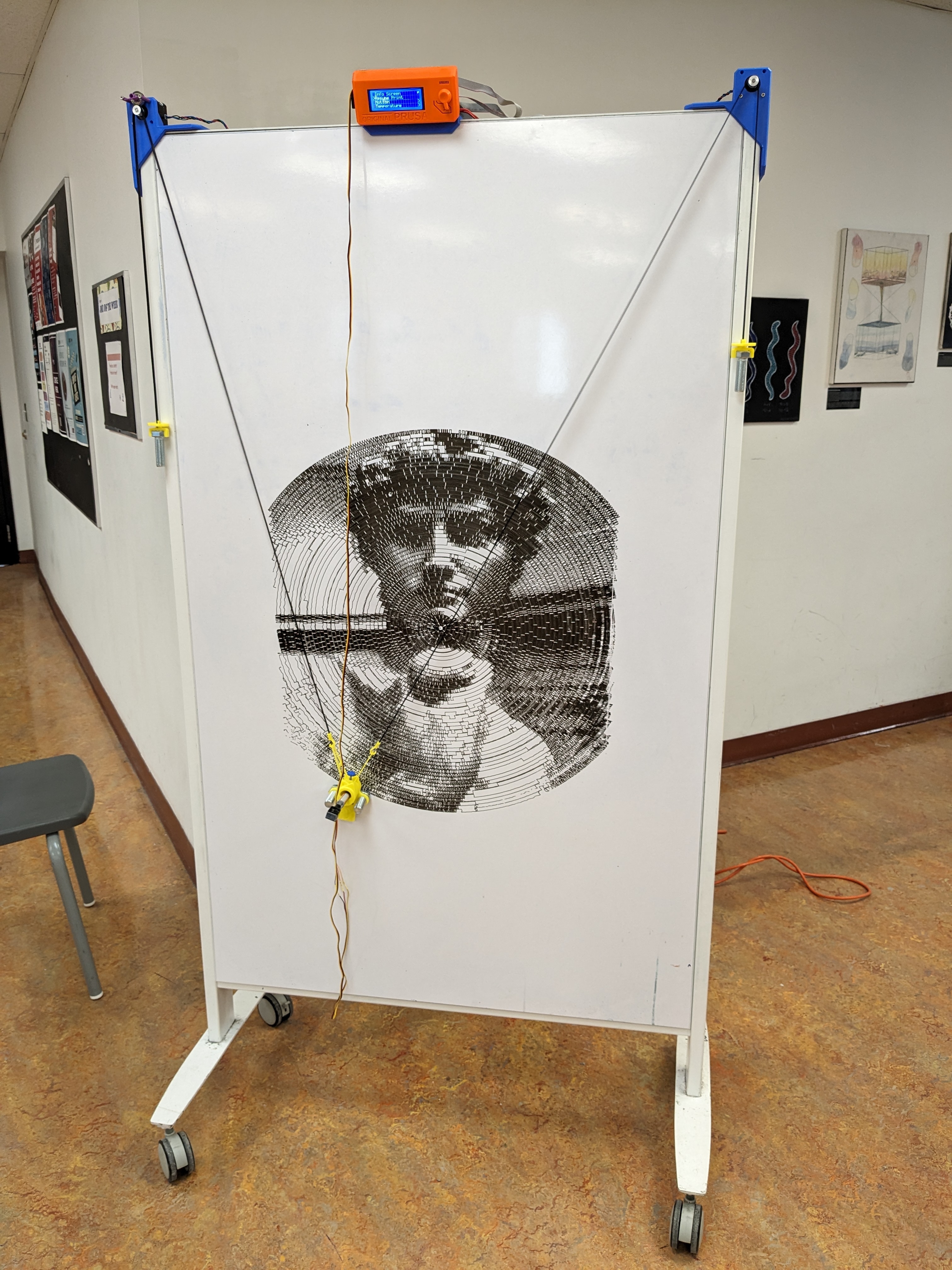
Since the school I work at had these large standing whiteboards, I designed and printed corner brackets to hold the motors, as well as a base for the electronics.

I’m still having trouble with the homing process, but very happy with the results so far!
I’ll be posting the firmware and 3d printed files online soon.
Using #4 would allow you to move the pen 40cm for every 10cm of counterweight travel.
Ah yes, different sized pulleys would work the same as the gear train I had in mind. Thanks for the explanation!
Edit: on second look, it’s more complex than that, as the weight is not connected to the end of the rope, but on a pulley.
Likely number 2 would be enough, would double the distance itself. You just need to attach it to the same corner bracket and have a pulley with the weight under it.